So, wo fang ich an…
Alles ist fertig, Wochenlange tests, ohne Probleme.
Den Regler zusammengeschraubt, Motor (Bilder folgen noch) dran, eingeschaltet …
Pfffffftttttttt……..
Also, alles wieder auseinandergeschraubt, Fehler mußte ich nicht suchen, da ich gesehen habe, wie die weiße neblige Hölle aus einem der Vorstufentransistoren kam.
Das ist ja mal sehr übel. Das ist dann eine Situation, in der ich die komplette Schaltug erst mal in Zweifel gezogen habe. OK, nach einigen Diskusionen mit Basti, hat er dann mal ein Spicemodel der Schaltung erstellt.
Der erste Eindruck war OK. Hier und da ein paar Spikes, aber nichts worauf man den Tot eines total unterforderten Vorstufentransistors schließen könnte. Basti hat dann also die Schaltung geändert, simuliert, ich habe die Einphasige Testschaltung aufgebaut, und diese dann Dreiphasig im Regler umgesetzt. Schaltung 2 geht nicht?! Hmmm… probleme mit dem Spicemodel?
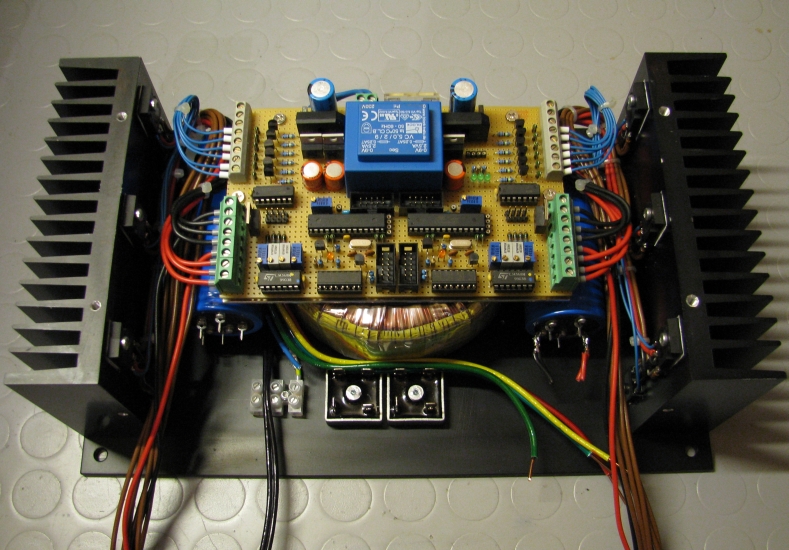
Schaltung geändert, Endstufentransistoren geändert, Simuliert, schaut gut aus. Ich die Schaltung 3 im Regler umgesetzt, geht nicht!? Hmmm… Der Verzweiflung schon nahe, nach nochmaligem Stundenlangen grübeln und testen, hat mir dann Basti Schaltung Nr. 4 geschickt. Alles neu aufgerollt, alles doppelt abgesichert und überdimensioniert. Alles nochmal zur Probe Einphasig aufgebaut, geht. Das Motherboard des Reglers zum 4ten mal umgebaut. Alles eingebaut, Netzteil dran, geht nicht.
Ahhhhhhhhhh….
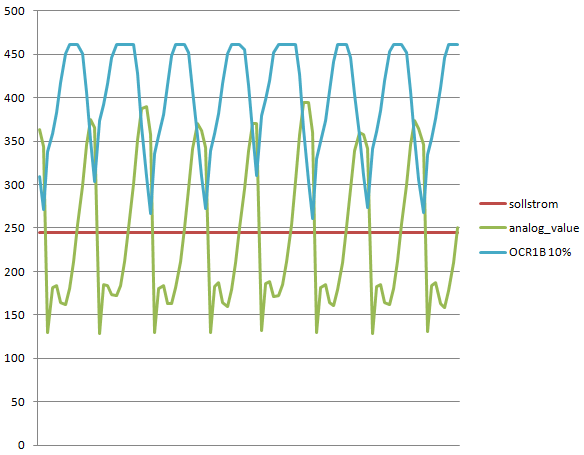
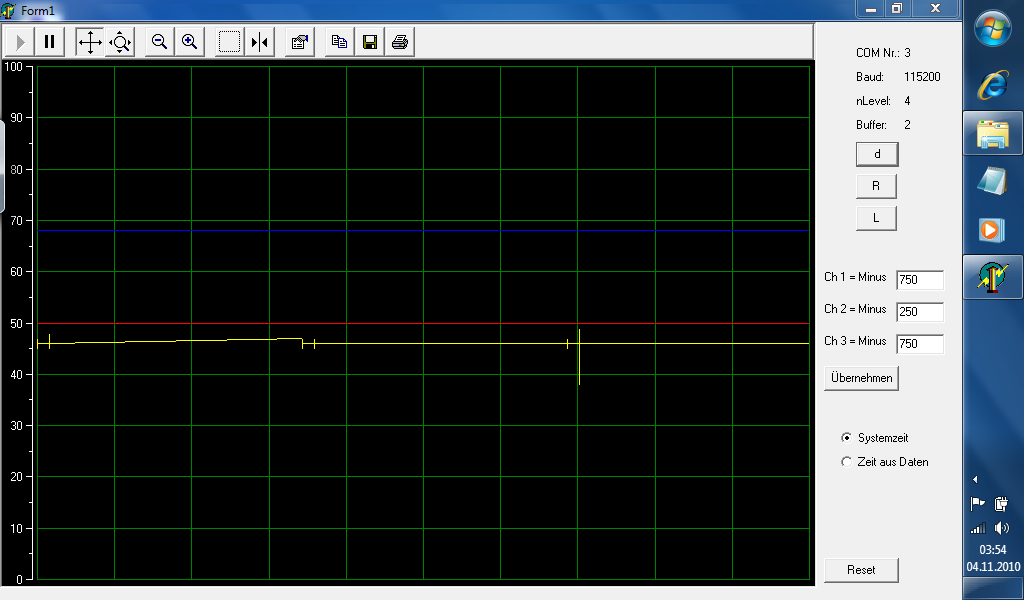
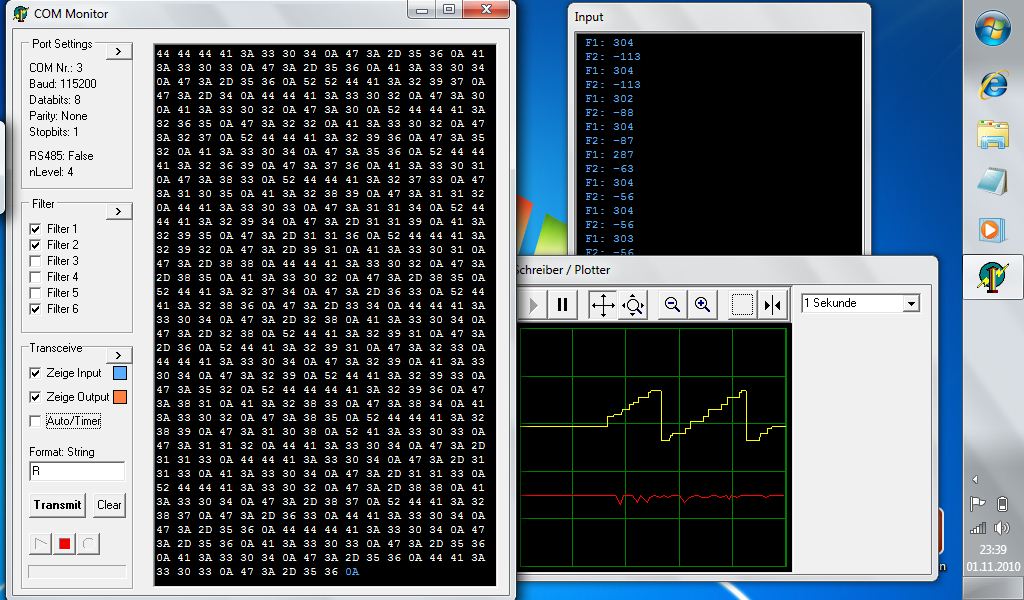
Oszi dran, gemessen, nanü, was sind das denn für komische Signale. Die dürften da garnicht sein.
Das Netzteil mußte nur 30mA liefern. Komisch, dachte ich mir, mess ich doch mal die Spannung am Shunt.
?
Warum hab ich denn da eine 30V Amplitude am Shunt, das kann doch garnicht sein.
Bämm … da hat mich der Schlag getroffen. Verdammte SCH%$!$%
Das letzte, aber auch wirklich das allerletzte, das ich vermutet hätte, was es zerreist, ist der Blöde Strommess-Shunt. Alle Schaltungen, auch die Ursprüngliche hätte funktioniert, wenn ich den Vorstufentransistor und den Shunt getauscht hätte.
Das Teil hätte nie Platzen dürfen, wo es total überdimensioniert war. Naja, Made in China halt.
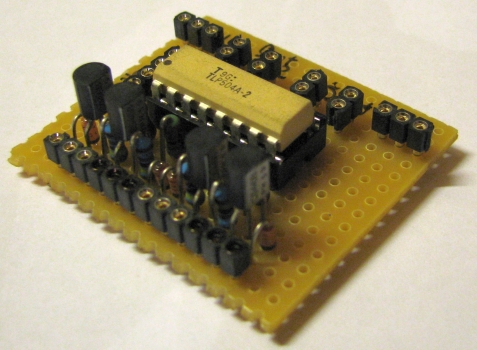
Also gut, sowas passiert mir nicht nochmal. Dann mach ichs halt auf die alt hergebrachte Art, und stell mir selbst einen her. Wiederstandsdraht aus der Kruschkiste rausgesucht, 8 Drähtchen Paralell gewickelt, die passende Länge ausgerechnet, ein paar Milimeter nachoptimiert, und eingebaut. Der Shunt geht nie wieder kaputt.
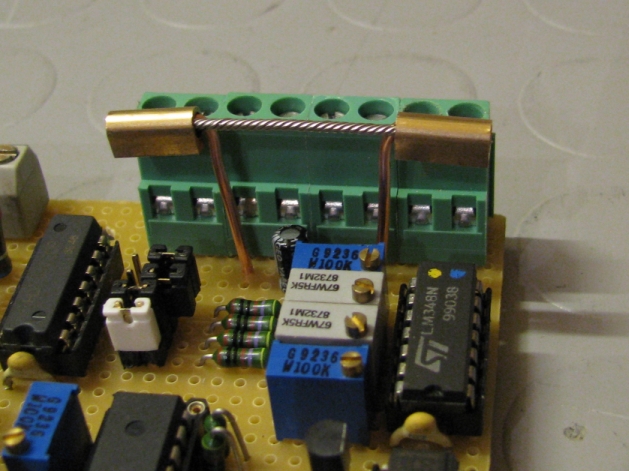
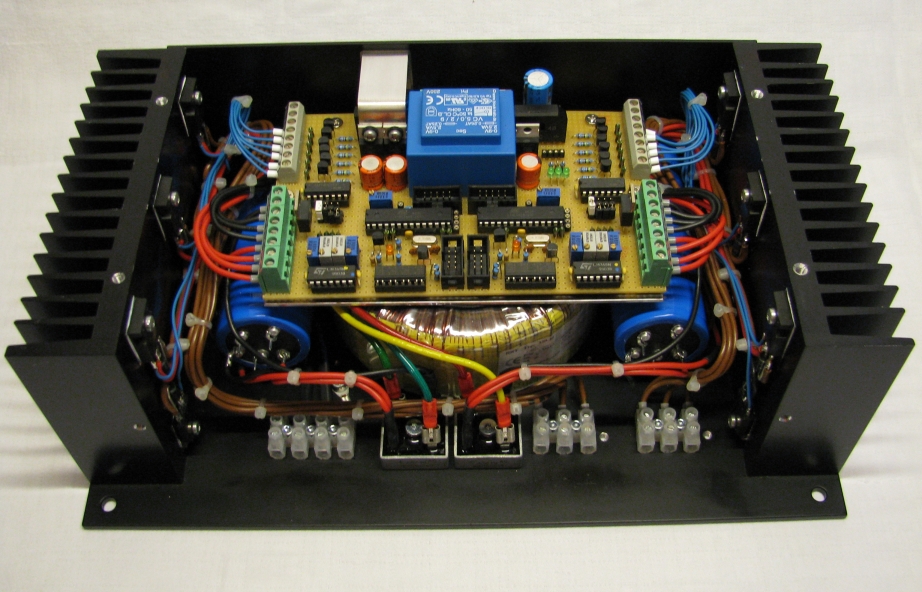
Gleich noch nen Entstörkondensator mit reingepackt, die Strommessung neu kalibiriert, das Motherboard wieder in den Regler eingebaut, und siehe da, es geht alles.
Ein gutes hats ja wenigstens. Nun sollte die Vorstufe gegen alle eventualitäten gesichert sein.
Nochmal 1000 Dank an Basti, für die vielen Simulationen, und die Arbeit bei den Layouts.
PS. 1,5 Stunden Burnin hat die Neue Schaltung schon hinter sich.