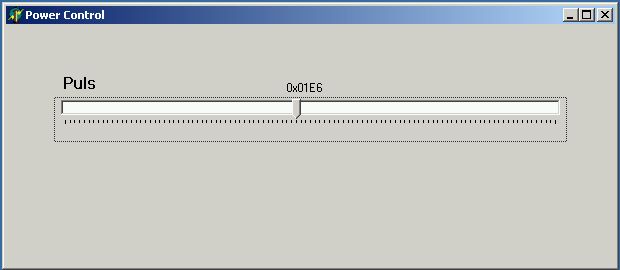
Nachdem Basti die neue Firmware für den Servoregler fertig hat, kann ich nun die Stromgrenzwerte des Motors vom PC aus einstellen und ermitteln.
Sehr nett 😀
Gruß
Edit:
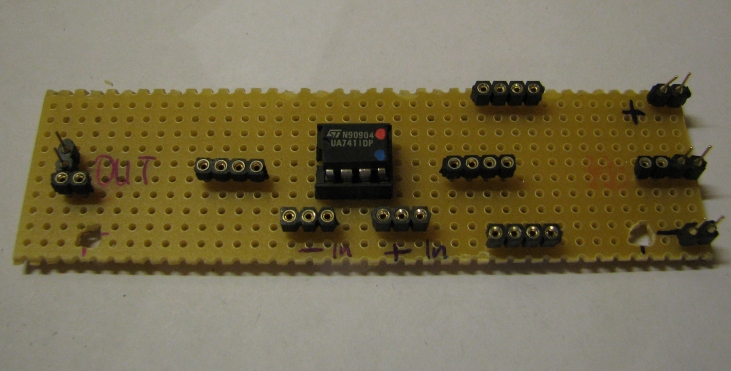
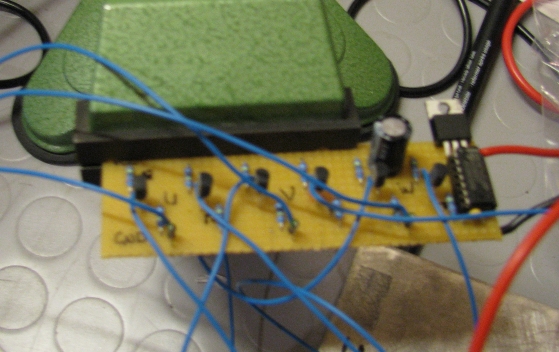
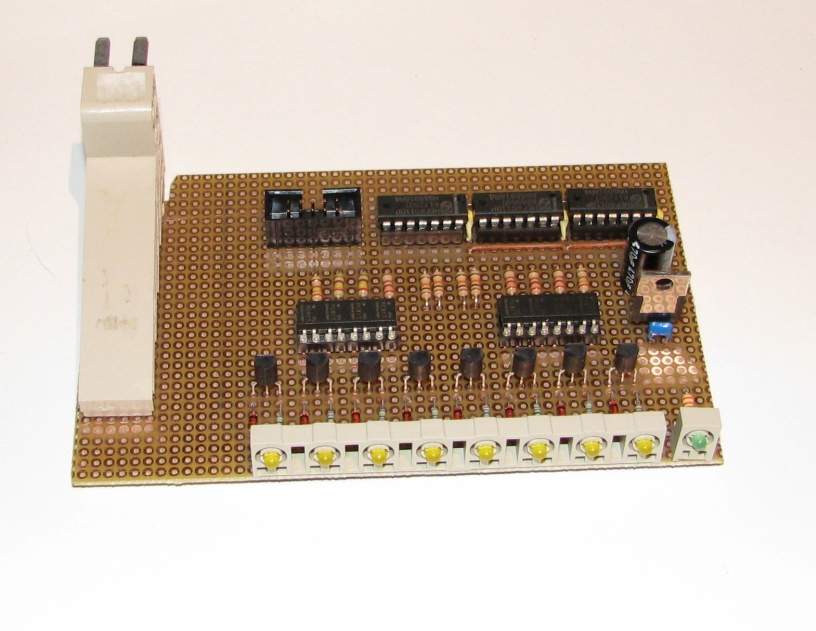
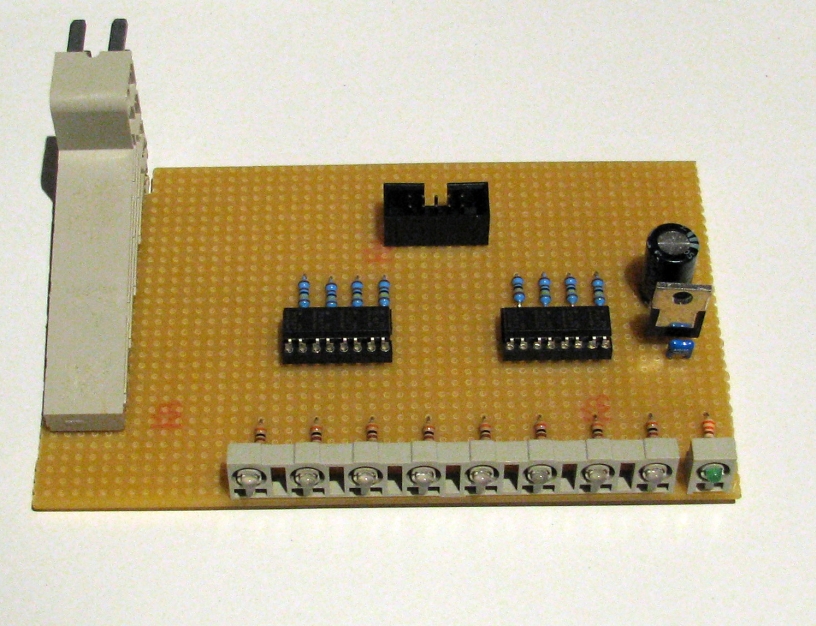
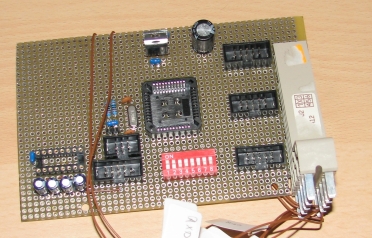
Für die nächsten Tests muß der Strom des Motors gemessen weden, um die Powercontrol dynamisch vom Mikrocontroller einstellen zu lassen. Zuerst wollte ich die Messung über einen Hall-Sensor machen. Nach Rücksprache mit Fachleuten in meiner Firma habe ich dann erfahren, das bei diesen Bauteilen bei einer Gleichspannungsmessung der Feritkern magnetisiert, und dann die Messwerte weglaufen. Nach einigem hin und her habe ich mich für eine direkte Lößung über einen OpAmp entschieden. Dafür und für die Aufbereitung des Gebersignals (Sinus/Cosinus 1Vss) habe ich auch erst mal ein Testboard zusammengebastelt.
Sooo, nach etwas längerer Zeit wieder mal ein paar News.
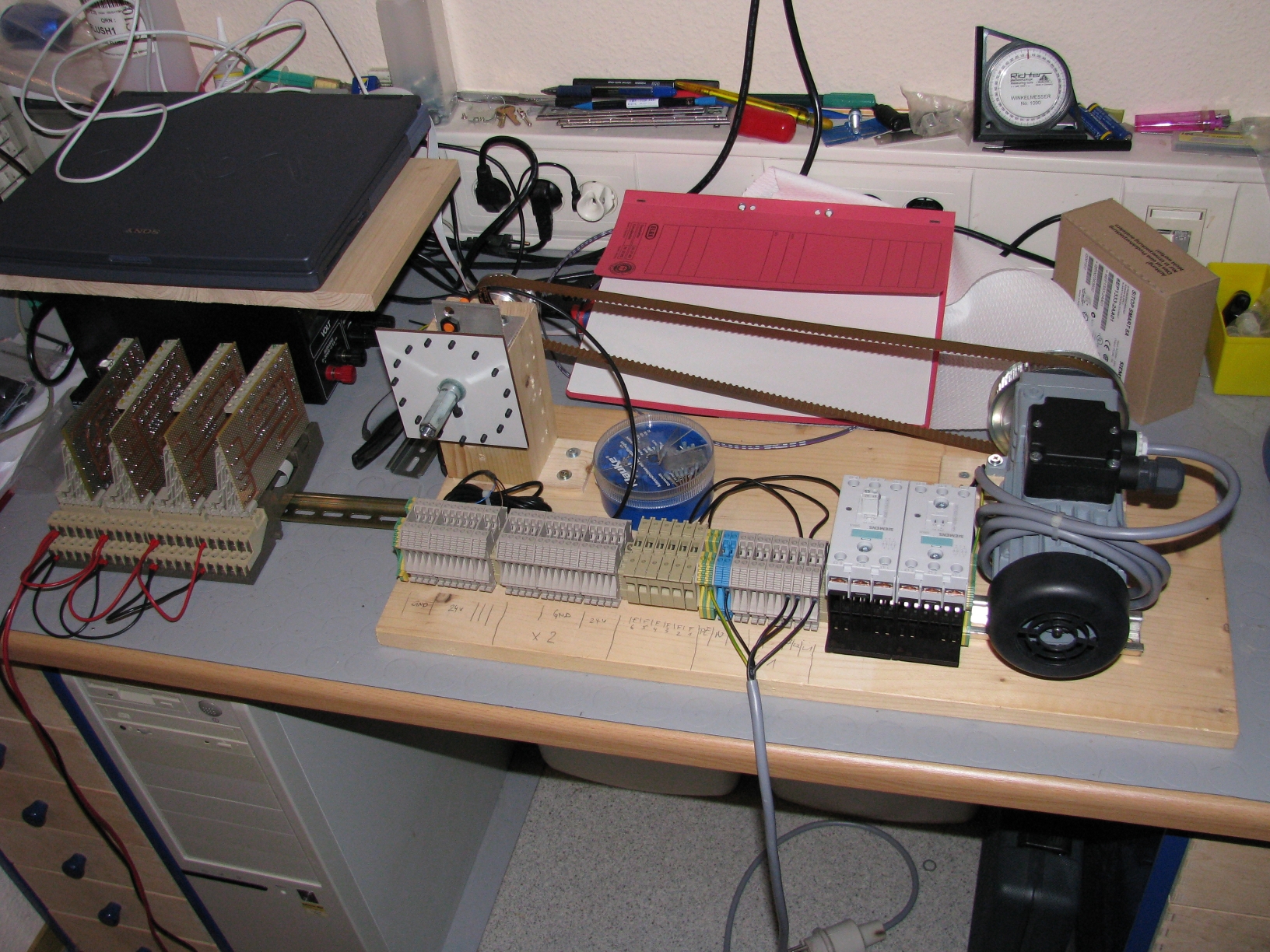
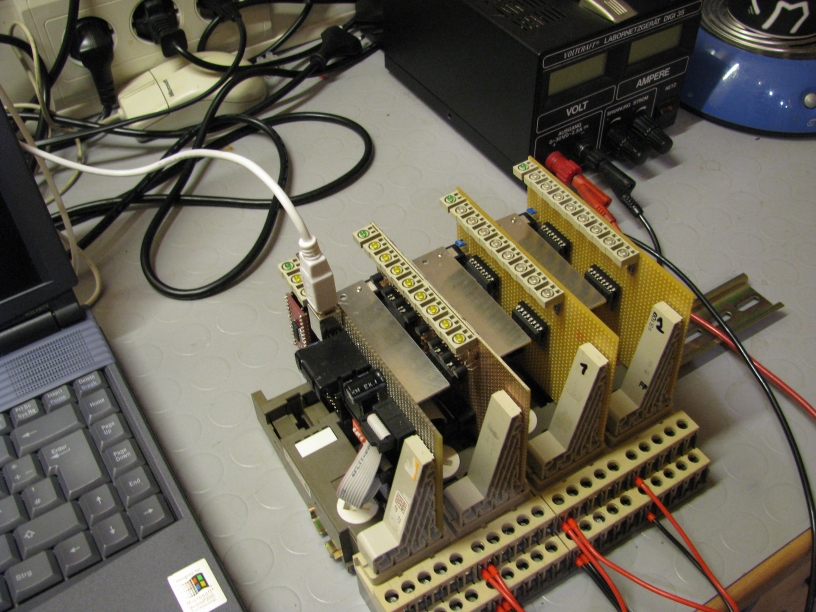
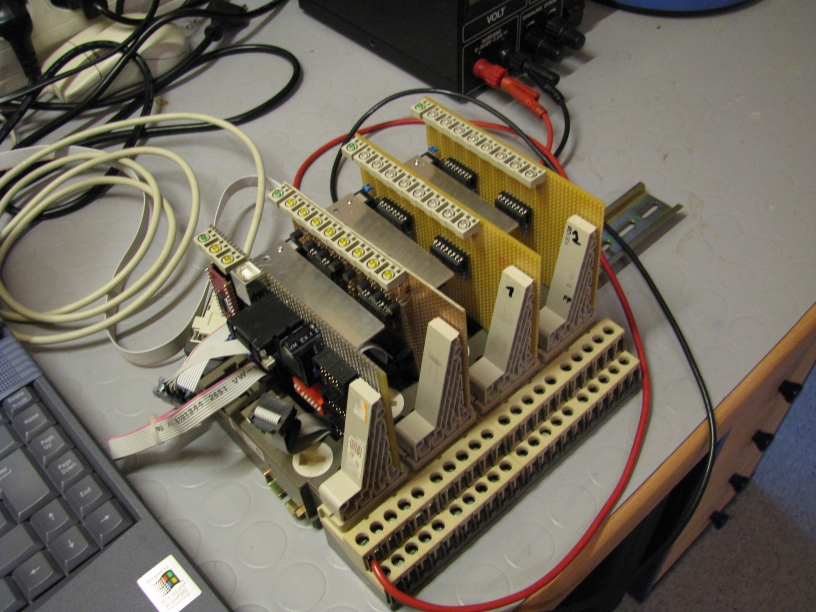
Nachdem ich den Testaufbau soweit hatte Und ihn verdrahtet hatte, haben wir (Basti und ich) an einem Schattigen Plätzchen die Funktionen gestestet. Anfangs lief alles sagenhaft. Die Kommunikation über USB geht 1A und die Funktionen der X-Achse liefen auch top. Dann habe ich alles auf die Y-Achse umgeklemmt, wir starteten die ersten Tests, und ein Bug in der Microcontroller Software sorgte dafür, das sich die Idee das ganze mit Drehstrommotoren zu realisieren, wortwörtlich in Rauch auflöste.
Für die Insider: Um die vielen Schaltvorgänge der Schütze besser zu realisieren habe ich mir Thyristorrelays bestellt. Diese schalten elektronisch. Nun hat die Steuerung beim Grundstellungsfahren den Motor linksherum gedreht. Nach erreichen der Grundstellung schaltete der Microcontroller auf rechtsrum. Ich habe das ganze Hardwaremäßig verriegelt, das nicht beide Schütze gleichzeitig an sein können. Woran keiner von uns gedacht hat, ist der „Thyristor“. Dieser schließt sich erst beim Nulldurchgang der Phase wieder. Nun ist der Microcontroller so schnell, das er den einen Schütz schon geöffnet hat, wärend der andere noch offen war. Bääämmm Kurtzschluß über 2 Drehstromphasen. Die Flinke 0,2 Amp Schmelzsicherung explodierte in einem Tempo, das es die Fassung mit zerrissen hat. Die Sicherung der 2 Phasen im Hausanschlußkasten war auch mit dran. Nach dem wiedereinschalten, mußte ich feststellen, das sich das eine der tollen Schütze zu den ewigen Jagdgründen begeben hat. 120 Euronen verpufft wie nix
Nunja man könnte es bestimmt irgendwie hintrixen, was sich garantiert auch auf die Zeit auswirkt, wodurch die ganze Steuerung träger werden würde, also mußte es anders gehn. Also doch zu den schonmal angesprochenen Schrittmotoren greifen.
Es soll ja nichts kosten, also muß da selbst was gebastelt werden. Ran an die Schrottkiste, und was zusammengenagelt.
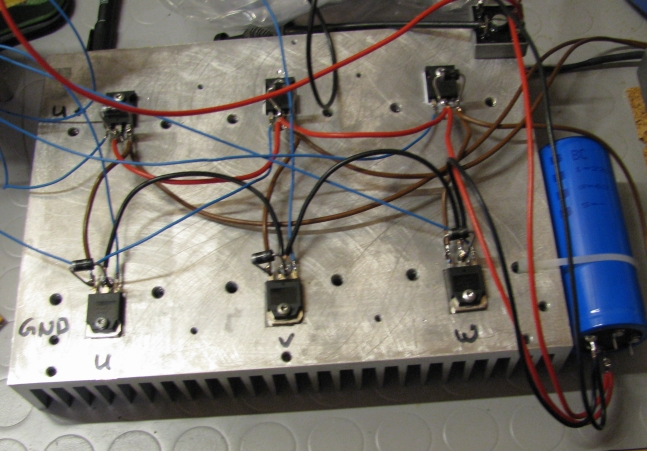
Zuerst ein paar experimente mit einer Glühbirne, einem NE555 Frequenzgenerator und einem Leistungstransistor, nachdem das funktioniert hatte, gleich mal „PROFI“sorisch das Leistungsteil auf nen Kühlkörper getackert. Beim ersten Test an einer Motorspule glühte gleich mal die zu klein Dimensionierte Diode durch wodurch der erste Leistungstransistor auch Flöten ging. Also gräßere Freilaufdioden und nen dicken Kühlkörper. Noch die Vorstufe zusammenbasteln Das Microkontroller Testboard rauskramen, verwursteln und von Basti ne kleine Treibersoftware schreiben lassen. Nach ein paar Optimierungen schnurrte das ganze wie gewünscht
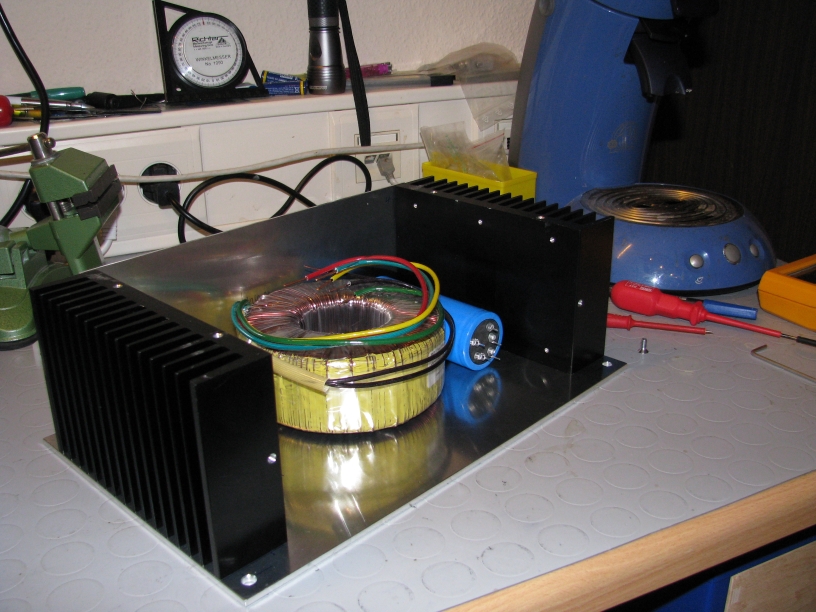
Inzwischen habe ich das zukünftige Zuhause meines 2 Achsen 3 Phasen DC Servomotor Reglers (Das Gehäuse) fertig. Nun müßen noch die Leistungsbauteile rein, ein Paar anschlüsse, und die elektronik muß zusammengebastelt werden. So das wars erst mal wieder von der Front.
Hier mein neustes Projekt
Geplant ist eine 2,5D CNC-Fräsmaschine.
Steuerbar über NC-Code, und über USB anzuschließen.
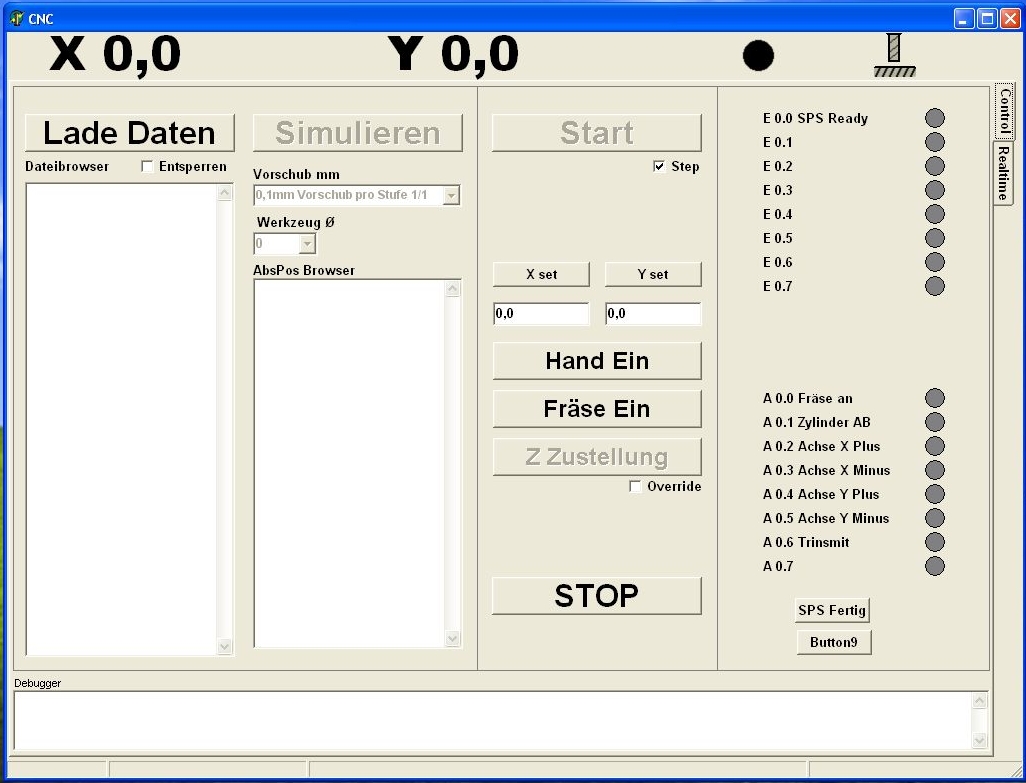
Die Software ist bereits fertiggestellt!
Bilder sind nicht von der neuesten Version der Software.
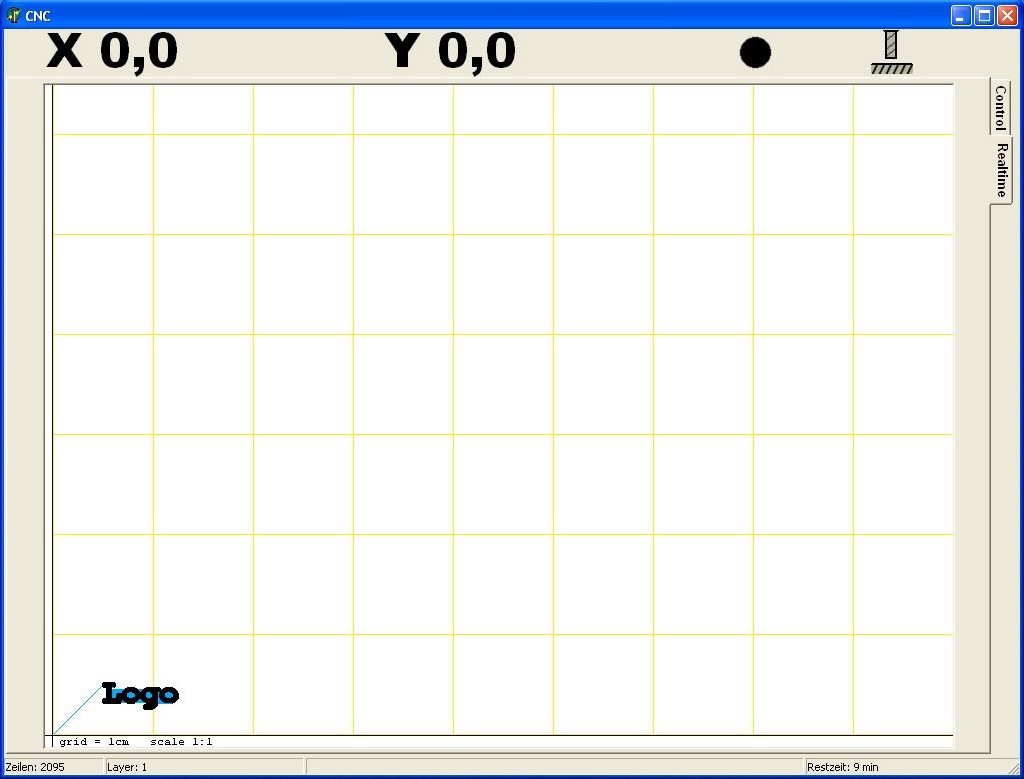
Hier sieht man die Simulationsoption. Später kann man hier in Echtzeit verfolgen, wie weit das Werkstück bearbeitet ist.
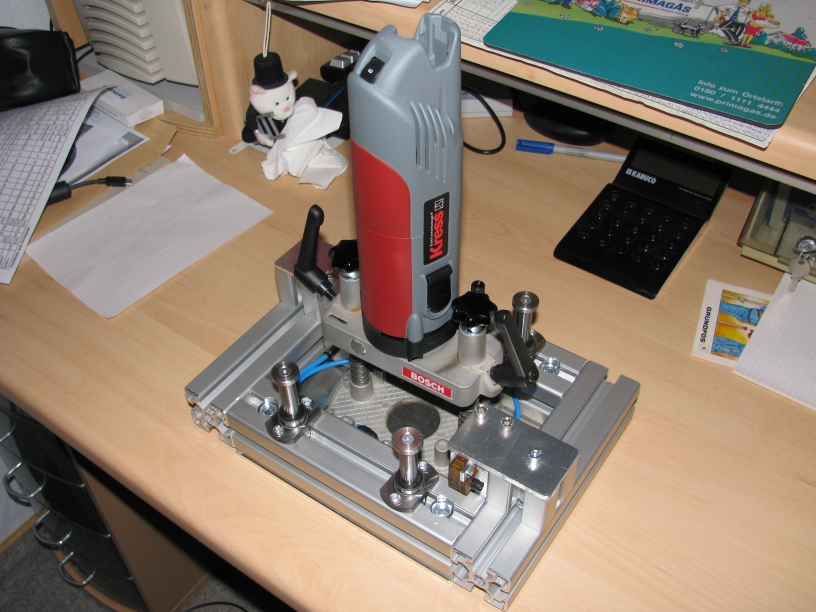
Hier eines der ersten „Hardware“ Teile. Die Aufnahme der Fräse. Hier wird die Z-Achsen Verstellung angebaut.
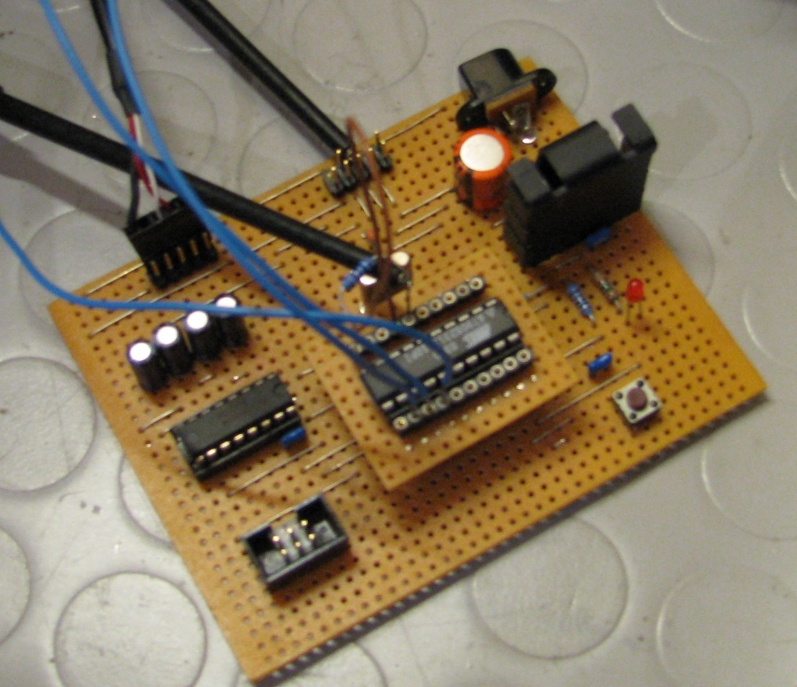
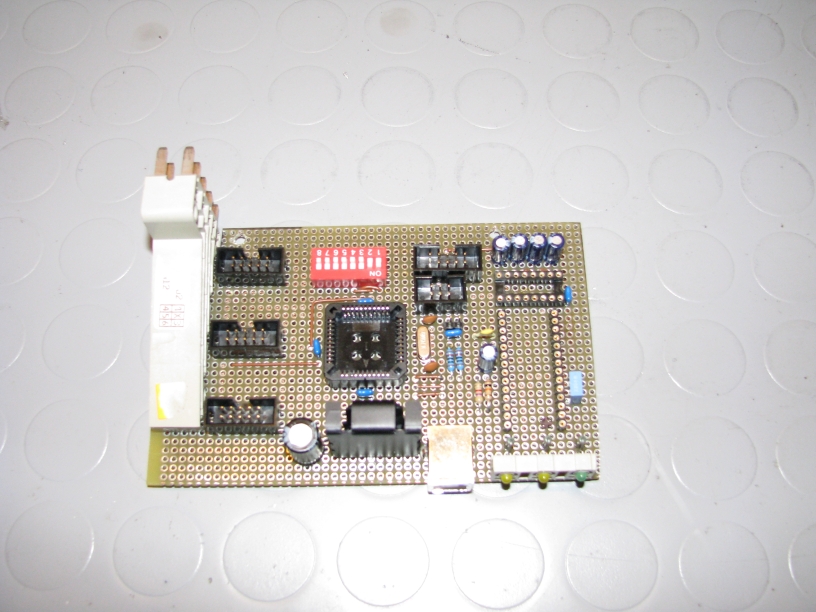
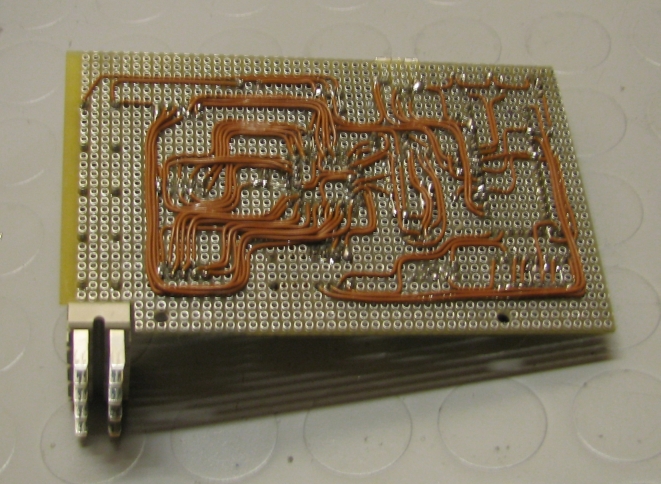
Hier die erste Platine. (noch nicht fertig) Enthalten ist der Microcontroller, zur Steuerung der IOs, die USB-Schnittstelle, und die Verbinder zu den IO-Karten.