Meine Zahnriemen sind endlich angekommen.
Die Kabel sind alle in den Schleppketten verlegt.
Die Endschalter und die Klemmkästchen sind angebracht.
Das Bedienteil und die Steuerung ist auch auf ihrem Platz.
Die Servosteuerung für die Motoren hatten wir ja schon grob eingestellt.
Nun hat mein Ingeneur die erste Version der Steuerungsfirmware fertiggemacht, ich habe es eingespielt, und es hat sich auch gleich was getan.
Leider aber nicht das erhoffte. Nach wenigen Schritten, blieben die Servos stehen.
Nun muß man sagen, es ist ja eine gewaltige Herausforderung, alleine den Servo zum drehen zu bringen (siehe oben).
Strommessung, Phasenumschaltung, Geberauswertung, Amplitudenmodulation, Impulsweitenanpassung, PID-Regler für die Amplituden Pulsweiteneinstellung …
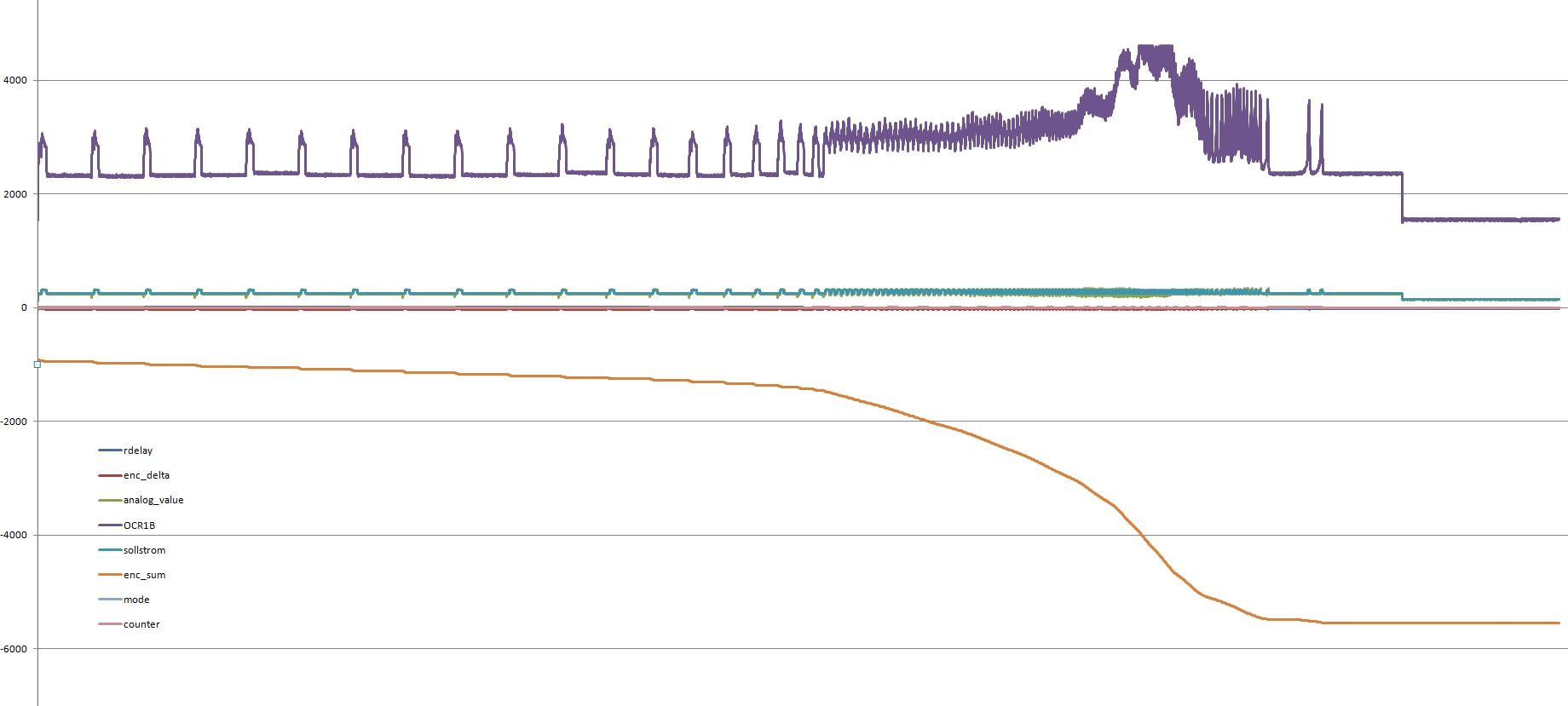
Schön wärs gewesen, wenn das schon alles wäre. Nach aufzeichnen etlicher Logfiles der Steuerung, und grübeln hinter den daraus erzeugten Excel Tabellen, mußten wir das Servoreglerkonzept nochmal überarbeiten, denn was wir bisher gemacht haben, hat weder die Magnetdynamik (Reluktanzkraft) noch die Last am Motor berücksichtigt.
Nachstellwinkel, Übersteuern, Delays, Regelung für die Delays Stromänderung an verschiedenen Stellen des Verfahrwinkels …
Das sind nur einige Punkte, über die alleine man schon ne Doktorarbeit schreiben könnte
Nach dem zusammentragen von Informationen aus den diversesten Quellen, und dem Studieren von Zahlen in Excel, nicht immer ganz ohne Beruhigungsmittel, kommen wir einer Lößung nun näher.
Grüßle Steffen